I currently work as Sr. Chassis Controls Engineer on the active suspension team at Zoox in Foster City, California,
In the past, I worked as a Sr. Controls Engineer at Monarch Tractor in Livermore, California. I carried out research on various dynamic mechanical and electrical systems involved in MK-V model of Monarch Tractor and wrote sophisticated controls algorithms for their efficient functioning. The mechanical dynamic systems include steer-by-wire, brake-by-wire, drive-by-wire, transmission, hydraulic cylinders, to name a few. Some of the electrical dynamic systems include high-voltage A/C motor, low-voltage DC motors, battery management systems (BMS), and charging system.
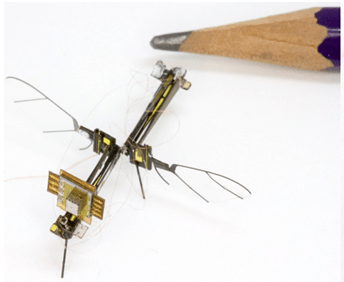
I received a Ph.D. in Mechanical Engineering from the University of Washington, where I worked at the Autonomous Insect Robotics (AIR) Laboratory advised by Prof. Sawyer Fuller.
Google Scholar, ResearchGate, LinkedIn





(Tractor pictures credit: Monarch Tractor)
My research focus and industry experience include-
- Dynamics and Controls,
- Micro‑fabrication,
- Autonomous systems, and
- Electrification of vehicles
Publications

Y. Chukewad, S. Chadha, K. Jagdale, N. Elkunchwar, U. Rosa, and Z. Omohundro: Tractor Three-Point Hitch Control for an Independent Lower Arms System, MDPI AgriEngineering, 2024 [link]
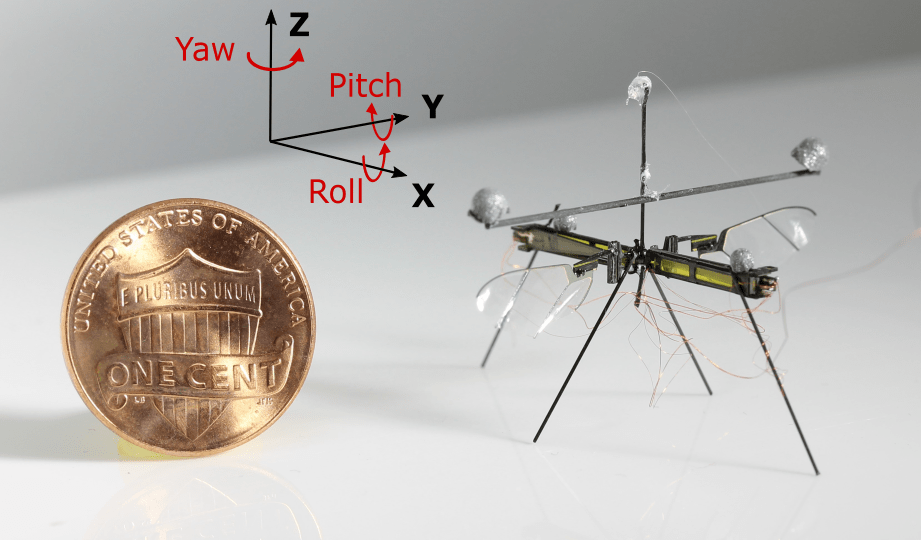
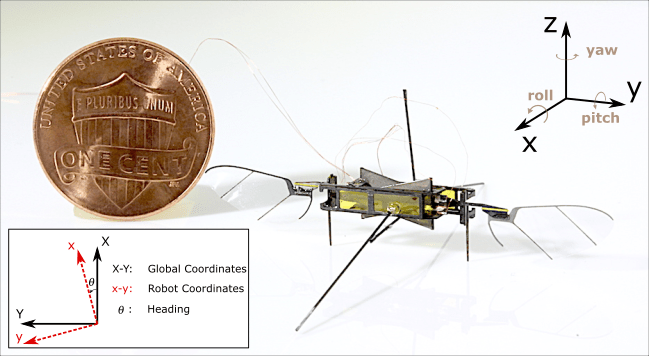
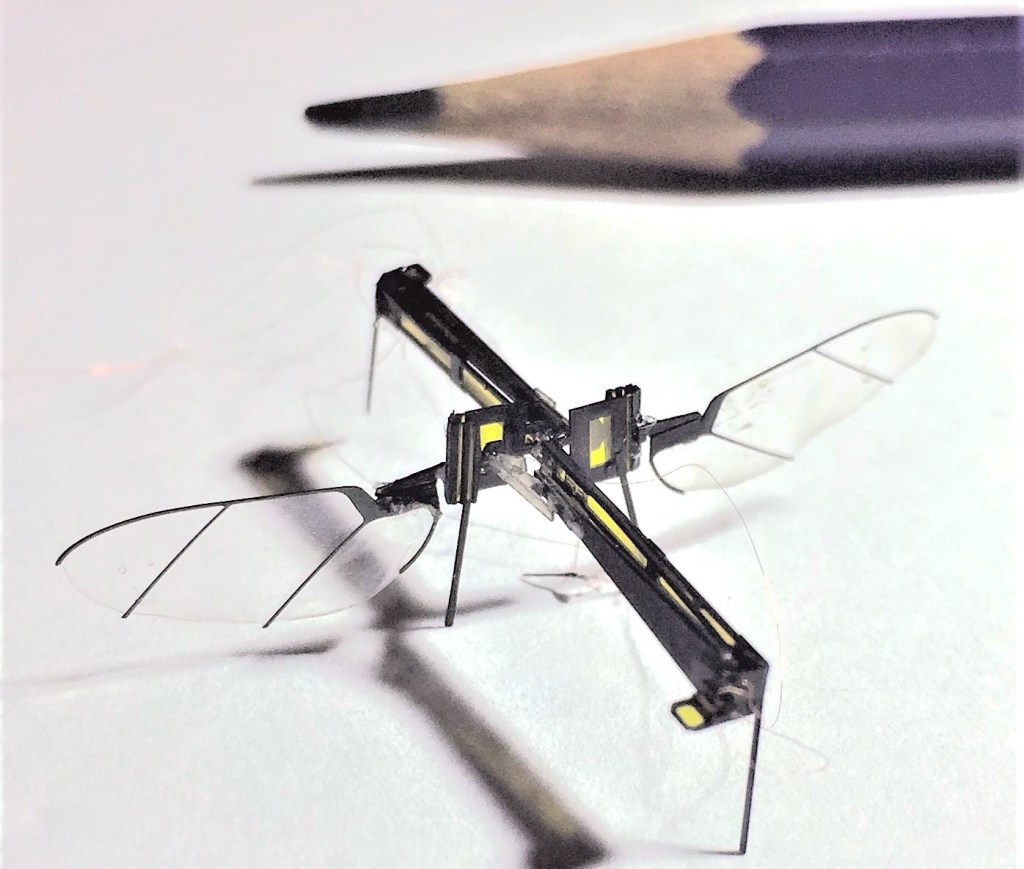
Y. Chukewad, A. Singh, J. James and S. B. Fuller, RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion, IEEE Transactions on Robotics (T-RO) [pdf]

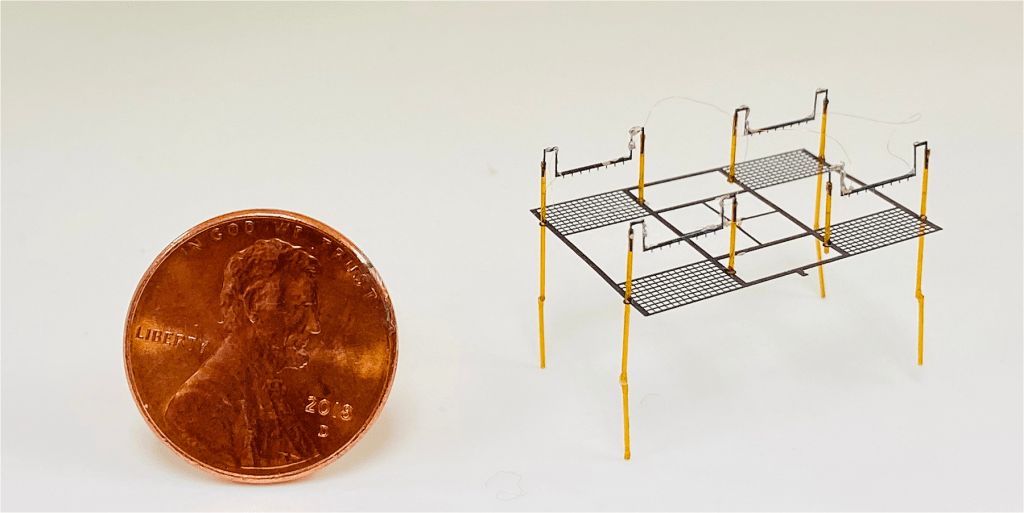
H.K. Hari Prasad*, R. Vaddi*, Y. Chukewad*, E. Dedic, I. Novosselov and S. B. Fuller, A laser-microfabricated electrohydrodynamic thruster for centimeter-scale aerial robots, PLOS ONE (2020) (* equal contributors) [pdf]
S. Balasubramanian, Y. Chukewad, J. James, G. Barrows, and S. B. Fuller, An Insect-Sized Robot That Uses a Custom-Built Onboard Camera and a Neural Network to Classify and Respond to Visual Input, IEEE International Conference on Biomedical Robotics and Biomechatronics (BIOROB) (Enschede, the Netherlands, 2018) [pdf]

2013 and earlier…
A. Sodemann and Y. Chukewad. Comparison of Cartesian and Polar Kinematic Arrangements for Compensation of Scale Effects in Micromilling, Proceedings of the ASME International Mechanical Engineering Congress and Exposition (IMECE 2013-65002), San Diego, CA, USA, November 15-21, 2013
Y. Wagh, Y. Chukewad, N. Gupta, and R. Singh, Experimental Investigation of Micro-scale Fiber Laser Based Surface Hardening, Proceedings of 6th ICOMM conference, Tokyo Denki University, Tokyo, March 2011
Abstract:
A. Singh, Y. Chukewad, and S. Fuller, A robot fly design with a low center of gravity folded from a single laminate sheet, Workshop on Foldable Robotics, IEEE Int. Conf. Intelligent Robots and Systems (IROS) (Vancouver, Canada, 2017)
Recent work in Media
[March 2020] Meet the Autonomous Insect Robots that will one day swarm the skies [Seeker][paper]
[January 2020] RoboFly: An insect-sized robot that can fly, walk, and drift on water surfaces [TechXplore] [DailyMailUK] [paper]
[July 2019] An Itty-Bitty Robot That Lifts Off Like a Sci-Fi Spaceship [Wired][paper]
[June 2018] The first wireless fly-sized drone [Wireless RoboFly] [IEEE Spectrum] [Economist] [Wired] [CNBC]
Teaching Experience
- Lecturer, University of Washington Bothell (Fall 2020)
- Instructor, University of Washington Seattle (Fall 2019)
- Teaching Assistant, University of Washington Seattle
Reviewer
- IEEE Transaction on Robotics
- IEEE Access
- IEEE Robotics and Automation Letters
- IEEE IROS
- IEEE ICRA
Talks
- Yogesh Chukewad, Johannes James, Daksh Dhingra and Vikram Iyer, “Robots at Insect-scale”, (Global Innovation Exchange (GIX)) (July 2019)
- Yogesh Chukewad, Johannes James and Vikram Iyer, “Robot Autonomy at Insect-scale”, (Microsoft Garage) (June 2018)
- Yogesh Chukewad, “A biology-inspired robot fly, capable of aerial and ground locomotion”, Nature-Inspired Flight Technologies + Ideas (NIFTI) (November 2017)
